
Faster R-CNN(2/5)発明ストーリーの作成
はぐれ弁理士 PA Tora-O です。前回(第1回)では、”Faster R-CNN” について具体的な実施例を交えて説明しました。改めて復習されたい方は、こちらのリンクから確認をお願いします。今回(第2回)は、前回の検討を踏まえて、クレームを含む発明ストーリーを完成させます。
発明ストーリー
【従来技術】
畳み込みニューラルネットワーク(CNN)を導入した物体検出手法の一例として、R-CNN(Regions with CNN features)が挙げられる。このR-CNNでは、[1]対象物を含む全体画像の中から部分画像を抽出し、[2]抽出された部分画像のサイズを調整し、[3]調整済みの部分画像をCNNに投入する。この類の物体検出では、対象物を含み得る関心領域の候補を多数設定した後、CNNの側でより高精度な検出を行っている。
【問題点と課題】
問題点は、設定された関心領域毎に特徴マップを生成する場合、関心領域の個数が増加するにつれて、すべての検出結果を得るまでの時間が掛かること。
課題は、関心領域内の部分画像を抽出する度に、部分画像の抽出および特徴マップの生成を順次行う場合と比べて、すべての検出結果を得るまでの演算時間を削減すること。
【クレーム】(Faster R-CNN)
対象物を含む画像を入力とし、該画像の全体特徴マップを出力とするマップ生成部と、
全体特徴マップの全体領域の中から関心領域を設定する領域設定部と、
設定された関心領域における部分特徴マップを全体特徴マップの中から抽出して出力する特徴抽出部と、
部分特徴マップから生成した特徴量を入力とし、関心領域内の検出結果を出力とする検出処理部と、を備え、
設定された関心領域毎に、部分特徴マップおよび検出結果の出力を順次行うことを特徴とする対象物検出装置。(217文字)
【作用と効果】
設定された関心領域における部分特徴マップを全体特徴マップの中から抽出して出力する特徴抽出部を設けることで、関心領域の設定数にかかわらず全体特徴マップの生成回数が1回で済む。これにより、関心領域を設定する度に、部分画像の抽出および特徴マップの生成を順次行う場合と比べて、すべての検出結果を得るまでの演算時間を削減することができる。
検討対象の再設定
既視感を覚えた方もいると思いますが、クレーム表現を除けば、過去の記事(Fast R-CNN)の発明ストーリーとかなり近い内容になりました。言い換えれば、”Fast R-CNN” と ”Faster R-CNN” は、ROIの設定タイミングが異なるバリエーションと捉えることができます。
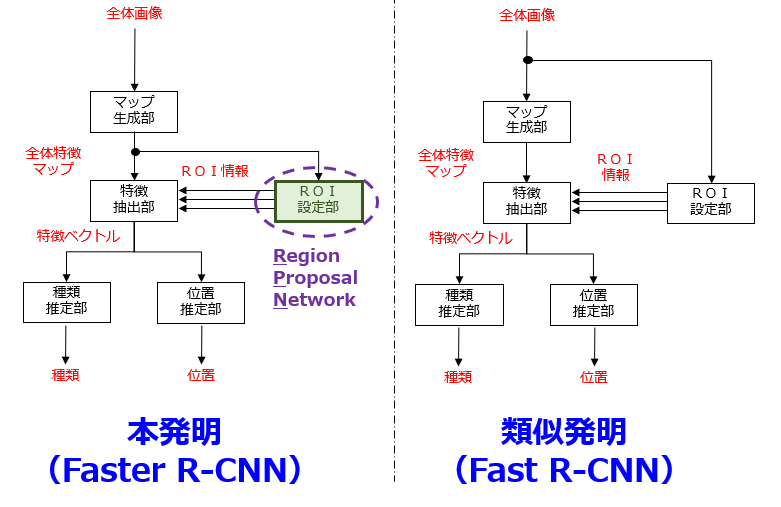
本検討の次の展開として、両者のバリエーションを包含するように上位概念化を図ることも一応考えました。が、AI弁理士として興味がある点は、むしろ、全体特徴マップからROI(あるいは、境界ボックス)を設定するための具体的な実現手法です。例えば、元の画像に含まれる物体の輪郭または領域をそれぞれ特定し、それらの位置関係からROIを設定する従来型の手法(例えば、”Selective Search”)であれば、その実現方法を何となくイメージできます。しかし、CNN演算を通じて、輪郭や領域などの可視的な情報が加工された特徴マップからどのように、ROIの位置およびサイズを設定できるのでしょうか?
今回の ”Faster R-CNN” では、RPN(Region Proposal Network)と呼ばれるニューラルネットワークを用いて、ROIの設定を実現しています。次回(第3回)以降、この「RPN」に関する事例検討を進めていきます。
↓ブログランキングに参加しています。よろしければ1クリックお願いします。