
全体平均プーリング(3/5)特許性の検討
はぐれ弁理士 PA Tora-O です。前回(第2回)は、GAPの概要について説明しました。改めて復習されたい方は、こちらのリンクから確認をお願いします。今回(第3回)は、GAPの特許性について具体的に検討したいと思います。
問題の提起
正直に言って、GAPって特許性が微妙ですよね?
という問題を提起してみます。この感覚はおそらく正しいと思います。その理由は、前回(第2回)に掲載した実装例の通り、メソッドの引数のうち取り得る1組(in_height,in_width)を選択することは、まさに設計事項の範囲内での変更であると考えられるからです。具体的には、GAPを適用することで、単に、特徴マップのサイズが最小化されたに過ぎない、というロジック(論理付け)を構築することができます。このように、仮に本発明が新規性をクリアできたとしても、上記したロジックを用いて進歩性が否定される可能性が高いという訳です(図1)。
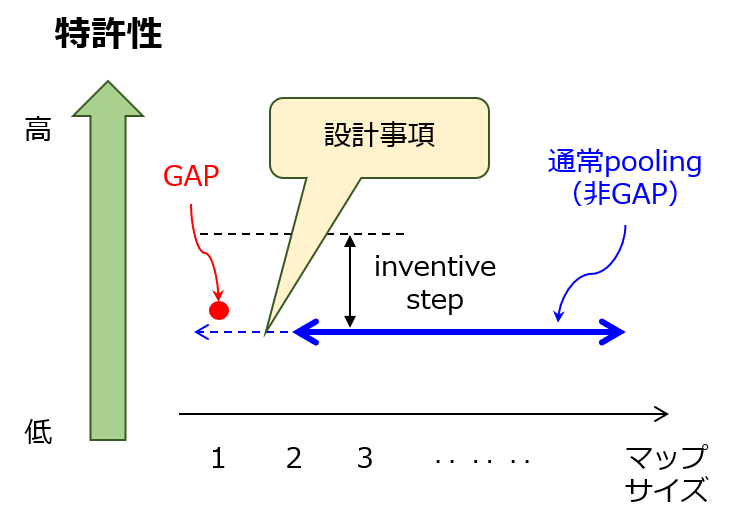
【図1】マップサイズを切り口とする特許性の評価
しかし、ここで諦めたら試合終了なので、AI弁理士として何とか妙案を捻り出してみます。
GAPの阻害要因
ところで、何故、全体領域にカーネルを設定してプーリング演算を行う発想が無かったのでしょうか?その理由として、GAPの適用を阻害する何らかの技術的要因(つまり、技術的阻害要因)があるためと考えられます。
前々回(第1回)で説明した通り、プーリングの目的は、位置情報の縮約(低解像度化)によって、途中で取り扱うボクセルデータのサイズを抑えることにあります。とは言え、物体検出を例に挙げると、画像に含まれる物体を精度良く検出するためには物体の位置情報が必要であることから、通常の技術者であれば、特徴マップの生成過程において位置情報を縮約することのみを想定しているはずです。
これに対して、GAPは、特徴マップ上の位置情報をあえて消失させることから、位置情報を残そうとするプーリング演算の趣旨と一見相反しています。このように、位置情報の有/無の観点から、GAPの適用にあたって技術的な阻害要因があると主張できそうです(図2)。
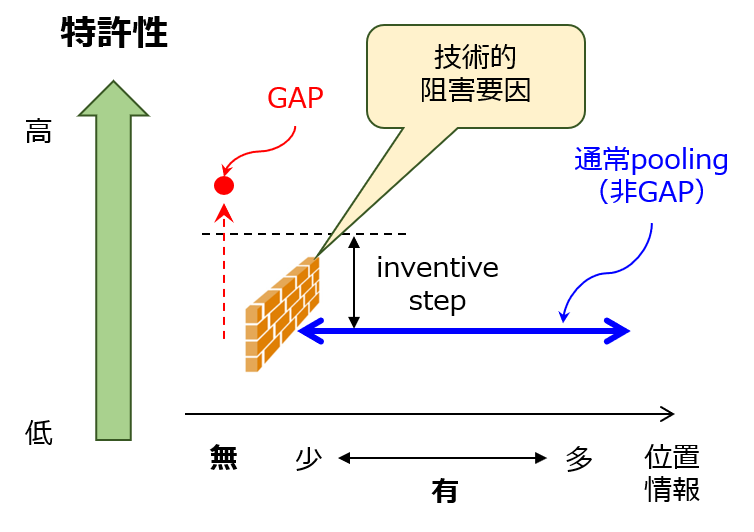
【図2】位置情報を切り口とする特許性の評価
GAPのメカニズム
GAPを用いて求めた特徴量は、2次元マップ上の位置情報を持っていません。それにもかかわらず、非GAPの場合と同等の認識精度を獲得できるのは何故でしょう?
例えば、1個のピクセル値(特徴量)になった時点で、2次元マップ上の位置情報が形式的に消失するものの、元の入力情報に対応する位置情報がピクセル値に既に埋め込まれていた、と考えてみます。そうすると、前段演算部による畳み込み演算の繰り返しを通じて中間マップが段階的に作成されることで、GAPの実行時には、何らかの形で位置情報が中間マップのピクセル値に反映されるようになった、と推定されます。実際にシミュレーションを行って確認した訳ではないですが、審査官を納得させる程度の説得力があると言えそうです。
以上、今回(第3回)は、GAPの特許性について検討し、何とか従来技術との差別化が図れそうな感触を得ました。次回(第4回)は、過去3回分の総括をします。
↓ブログランキングに参加しています。よろしければ1クリックお願いします。